Современные способы регулирования частоты вращения электродвигателей постоянного тока
Описанные принципы регулирования частоты вращения в двигательном и тормозных режимах находят свою практическую реализацию в четырех основных способах регулирования:
1) реостатно-контакторное управление;
2) регулирование по системе «генератор–двигатель»;
3) регулирование по системе «управляемый выпрямитель–двигатель»;
4) импульсное регулирование.
Подробное исследование этих способов регулирования дается в
курсах электропривода и теории автоматического регулирования. В этом разделе будут рассмотрены только основные положения, имеющие непосредственное отношение к теории электрических машин.
Реостатно-контакторное управление.
В настоящее время это управление применяют весьма широко для регулирования частоты вращения двигателей малой и средней мощности, а иногда (на железнодорожном транспорте) и для регулирования мощных двигателей.
Обычно при реостатно-контакторном управлении используют два метода регулирования: при частотах вращения, меньших номинальной, в цепь якоря включают дополнительные сопротивления; при повышенных частотах вращения регулируют ток возбуждения.
Машины малой мощности при отсутствии автоматизированного управления имеют два ползунковых регулировочных реостата, один из которых включен в цепь якоря, а другой – в цепь возбуждения. При больших мощностях, а также при необходимости автоматизации процесса величину сопротивлений изменяют ступенчато (рис. 10–76) при помощи контакторов. Если требуется точное регулирование, то число контакторов должно быть очень большим, при этом вся установка становится громоздкой, дорогой и сравнительно малонадежной.
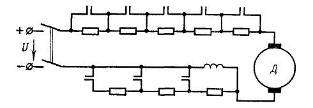
Рис. 2.76 – Схема реостатно-контакторного регулирования частоты вращения двигателя с последовательным возбуждением
Реостатно-контакторная система при двигателях с параллельным возбуждением позволяет в зоне высоких частот вращения осуществлять рекуперативное торможение путем увеличения тока возбуждения. В зоне низких частот вращения применяют реостатное торможение, причем регулирование тормозного усилия осуществляют при помощи той же реостатно-контакторной установки, которая регулирует двигательный режим, после соответствующего переключения схемы.
В связи со сложностью автоматизации и большими расходами, идущими на ремонт и эксплуатацию, реостатно-контакторное управление в настоящее время постепенно заменяют более совершенными системами управления.
Система «генератор-двигатель».
В этой установке (рис. 2.77) двигатель Д получает питание от автономного генератора Г с независимым возбуждением, который приводят во вращение от какого-либо первичного двигателя ПД (электродвигателя, дизеля и пр.). Регулирование частоты вращения осуществляют изменением:
1) напряжения на якоре двигателя путем изменения тока возбуждения генератора;
2) магнитного потока двигателя путем регулирования тока возбуждения двигателя.
Пуск в ход и получение низких частот вращения производят при максимальном токе возбуждения двигателя, но при уменьшенном токе возбуждения генератора, т.е. при пониженном напряжении. Ослабление магнитного потока двигателя (уменьшение его тока возбуждения) производят только после того, как исчерпана возможность повышения напряжения, т.е. когда установлен максимальный ток возбуждения генератора. Изменение направления вращения двигателя производят путем изменения полярности подводимого к якорю напряжения, для чего изменяют направление тока в обмотке возбуждения генератора.
Система «генератор – двигатель»
выгодно отличается тем, что в ней отсутствуют силовые контакторы, реостаты и т.п. Поскольку управление двигателем осуществляют путем регулирования сравнительно небольших токов возбуждения, управление легко поддается автоматизации.
Установки типа «генератор–двигатель» получили широкое распространение в промышленности и на транспорте, в тех устройствах, где требуется регулирование частоты вращения в широких пределах. В транспортных установках генератор приводится во вращение дизелем. В промышленности обычно для привода генератора используют трехфазные синхронные или асинхронные двигатели.