Цель и задачи
Курсовая работа выполняется с целью закрепления знаний по курсу «Общая электротехника и электроника» и развития навыков самостоятельной работы студентов при разработке технического задания, проектировании и эксплуатации отдельных узлов микропроцессорных систем ЧПУ и обработки данных. Задачами выполнения курсовой работы являются:
- получение навыков разработки схемотехнических вопросов микро процессорной техники;
- проработка ряда вопросов, связанных с прикладным программным обеспечением микропроцессорных систем;
- приобретение практических навыков составления и расчета принципиальных электрических схем цифровой и аналоговой техники.
Принцип работы ЭП ПТ и общие требования к функционированию контроллера
Электродвигатели (ЭД) постоянного тока нашли широкое применение в приводах главного движения и приводах подач металлорежущих станков и промышленных роботов. Причина - простой способ регулирования частоты вращения вала электродвигателя путем изменения величины управляющего постоянного напряжения. Чем больше управляющее напряжение, тем выше частота вращения. Причем изменение полярности управляющего напряжения приводит к изменению направления вращения вала электродвигателя.
В комплект ЭП ПТ входит тахогенератор ТГ, который закреплен на валу ЭД. Выходное напряжение ТГ, которое пропорционально частоте вращения вала ЭД, используется для ее контроля.
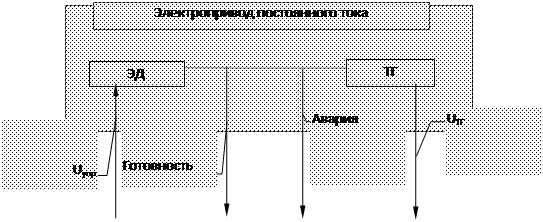
Для управления ЭП ПТ применяются МП контроллеры, которые должны в зависимости от требуемой частоты вращения задавать управляющее напряжение Uупр и контролировать фактическую ее величину по уровню постоянного напряжения, снимаемого с тахогенератора Uтг (рис. 1).
 |
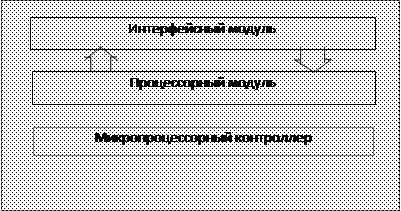 |
Рис. 1 Структура электропривода постоянного тока с микропроцессорным управлением
В состав МП контроллера входят два модуля: процессорный и интерфейсный. Процессорный модуль осуществляет отработку управляющих про грамм для реализации алгоритма управления ЭП ПТ. Интерфейсный модуль обеспечивает связь процессорного модуля с электроприводом: преобразование цифровых сигналов в аналоговые и наоборот, промежуточное хранение данных и фиксацию управляющих сигналов.
Проектируемый МП контроллер обеспечивает следующий алгоритм работы ЭП ПТ.
Перед пуском ЭД, т.е. перед подачей Uупр, МП контроллер проверяет наличие сигнала "Готовность", поступающего с электропривода (наличие пи тающего напряжения, снятие различных блокировок и т.д.). При отсутствии данного сигнала МП контроллер не производит пуск ЭД и выдает сигнал "Сбой" на световой индикатор. Если сигнал "Готовность" присутствует, то процессорный модуль МП контроллера выдает в интерфейсный модуль цифровой эквивалент Uупр, который цифро-аналоговым преобразователем преобразуется в аналоговую величину.
После подачи Uупр на электродвигатель МП контроллер осуществляет программным способом определенную по времени задержку, необходимую для разгона ЭД до заданной частоты вращения, а затем вводит цифровой эквивалент напряжения ТГ. Преобразование аналоговой величины UТГ в цифровую осуществляется в интерфейсном модуле аналого-цифровым преобразователем.
После ввода UТГ МП контроллер приступает к сравниванию ее величины с yровнем Uупр. Если уровень UТГ соответствует Uупр, то пуск произошел в нормальном режиме.
Если соответствия нет, то имеет место нештатная ситуация, например, перегрузка ЭД. В этом случае МП контроллер выдает нулевой уровень Uупр (останов ЭД) и сигнал "Сбой", который индицируется светодиодом в интерфейсном модуле.
При пуске ЭД могут возникнуть различные аварийные ситуации. При наличии сигнала "Авария" МП контроллер должен прервать подпрограмму пуска, остановить ЭД и выдать сигнал "Сбой".