Электродвигатели постоянного тока
![]() , (2.77а)
, (2.77а)
где n0 = U/(сеФ) – частота вращения при холостом ходе; Δn = (∑r + rп) Iа/(сеФ) – уменьшение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя.
Величина Δn, т.е. сумма сопротивлений ∑r + rп, определяет наклон скоростной n = f(Ia) и механической М = f(Iа) характеристик к оси абсцисс. При отсутствии в цепи якоря добавочного сопротивления rп указанные характеристики будут «жесткими» (естественные характеристики 1 на рис. 2.60, б и 2.61, а), так как падение напряжения Iа∑r в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3–5% от Uном. При включении добавочного сопротивления rп угол наклона этих характеристик возрастает, вследствие чего образуется семейство реостатных характеристик 2, 3, 4, соответствующих различным значениям rп2, rп3 и rп4. Чем больше сопротивление rп, тем больший угол наклона имеет реостатная характеристика, т.е. тем она «мягче». Следует отметить, что реакция якоря, уменьшая несколько поток машины Ф при нагрузке, стремится придать естественной механической характеристике отрицательный угол наклона, при котором частота вращения n возрастает с увеличением момента М. Однако двигатель с такой характеристикой в большинстве электроприводов устойчиво работать не может. Поэтому современные мощные двигатели с параллельным возбуждением часто снабжают небольшой последовательной обмоткой возбуждения, которая придает механической характеристике необходимый наклон. М. д. с. этой обмотки при токе Iном составляет 10% от м. д. с. параллельной обмотки.
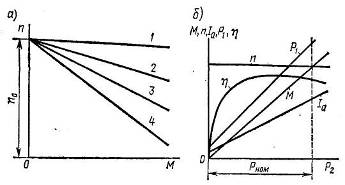
Рис. 2.61 – Механические и рабочие характеристики двигателя с параллельным возбуждением
Регулировочный реостат rp.в позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. Как следует из (2.77а), при этом будет изменяться и частота вращения n. В цепь обмотки возбуждения выключатели и предохранители не устанавливают, так как при разрыве этой цепи и небольшой нагрузке на валу частота вращения двигателя резко возрастает (двигатель идет в «разнос»). При этом сильно увеличивается ток якоря и возникает круговой огонь.
На рис. 2.61, б изображены рабочие характеристики рассматриваемого двигателя. Они представляют собой зависимости потребляемой мощности P1 тока Ia ≈ Iн, частоты вращения n, момента М и к. п. д. η от отдаваемой мощности Р2 на валу двигателя при U = const и Iв = const. Характеристики n = f(P2) и M = f(Р2), как следует из рассмотренных ранее положений, являются линейными, а зависимости Pl = f(P2), Ia = f(P2) и η = f(P2) имеют характер, общий для всех электрических машин. Иногда рабочие характеристики строят в зависимости от тока якоря Iа.
В случае, если обмотка якоря двигателя и обмотка возбуждения подключены к источникам питания с различными напряжениями, его называют двигателем с независимым возбуждением. Такие двигатели применяют в электрических приводах, у которых питание двигателей осуществляется от генераторов или полупроводниковых преобразователей. Механические и рабочие характеристики двигателя с независимым возбуждением аналогичны характеристикам двигателя с параллельным возбуждением, так как у них ток возбуждения Iв также не зависит от тока якоря Iа.
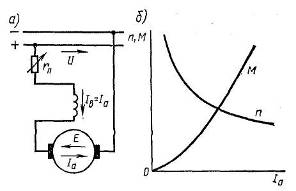
Рис. 2.62 – Схема двигателя с последовательным возбуждением, зависимости его момента и частоты вращения от тока якоря
Двигатель с последовательным возбуждением.
В этом двигателе (рис. 2.62, а) ток возбуждения Iв = Iа, поэтому магнитный поток Ф является некоторой функцией тока якоря Iа. Характер этой функции изменяется в зависимости от нагрузки двигателя. При токе якоря 1а < (0,8 ÷ 0,9) Iном, когда магнитная система машины не насыщена Ф = kфIа, причем коэффициент пропорциональности kФ в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф растет медленнее, чем Iа, и при больших нагрузках (Iа > Iном) можно считать, что Ф = const. В соответствии с этим изменяются и зависимости n = f(Ia) и M – f(Ia).