Электродвигатели постоянного тока
При токе якоря Iа < (0,8 ÷ 0,9) Iном частота вращения
![]() , (2.78)
, (2.78)
где с1 и с2 – постоянные.
Следовательно, скоростная характеристика двигателя n = f (Ia) имеет форму гиперболы (рис. 2.62, б).
При токе якоря Iа > Iном частота вращения
![]() , (2.78а)
, (2.78а)
где с'1 и с'2 – постоянные.
В этом случае скоростная характеристика n = f(Ia) становится линейной.
Аналогично может быть получена зависимость электромагнитного момента от тока якоря–M = f(Ia). При Iа < (0,8 ÷ 0,9) Iиом электромагнитный момент
![]() , (2.79)
, (2.79)
где c3 – постоянная.
Следовательно, моментная характеристика М = f(Iа) имеет форму параболы (рис. 2.62, б).
При Iа > Iном электромагнитный момент
![]() , (2.79а)
, (2.79а)
где с'3–постоянная.
В этом случае зависимость M = f(Ia) становится линейной.
Механические характеристики n = f(M) (см. рис. 2.63, а) могут быть построены на основании зависимостей ni = f(Ia) и M=f(Ia). При токе якоря, меньшем (0,8 ÷ 0,9) Iном, частота вращения изменяется по закону
![]() , (2.80)
, (2.80)
где с»1–постоянная.
При токе якоря, большим Iном, зависимость n = f(M) становится линейной.
Кроме естественной характеристики 1, путем включения добавочных пусковых сопротивлений rп в цепь якоря можно получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям rп2, rп3 и rп4; причем чем больше гп, тем ниже располагается характеристика.
Из рис. 2.63, а следует, что механические характеристики рассматриваемого двигателя (естественная и реостатные) являются «мягкими» и имеют гиперболический характер.
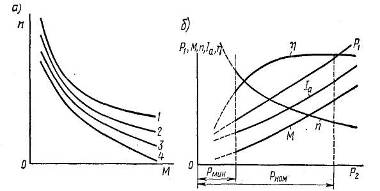
Рис. 2.63 – Механические и рабочие характеристики двигателя с последовательным возбуждением
При малых нагрузках частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет в «разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка составляет (0,2 –0,25) Iном; только двигатели очень малой мощности (десятки ватт) используют для работы в устройствах, где возможен холостой ход. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты для включения недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют в различных электрических приводах, особенно там, где имеют место изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.). Объясняется это тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением. При жесткой характеристике частота вращения n почти не зависит от момента М, поэтому мощность
![]() , (2.81)
, (2.81)
где с4 – постоянная.
При мягкой характеристике двигателя с последовательным возбуждением частота вращения n обратно пропорциональна ![]() , вследствие чего
, вследствие чего
![]() , (2.81а)
, (2.81а)