Мощность и электромагнитный момент синхронной машины. статическая устойчивость
Статическая перегружаемость синхронной машины оценивается отношением
![]() . (1.37)
. (1.37)
Согласно ГОСТу это отношение для турбогенераторов и гидрогенераторов должно быть не менее 1,6–1,7, а для синхронных двигателей большой и средней мощности – не менее 1,65.
Коэффициент синхронизирующего момента имеет максимальное значение при θ = 0 и уменьшается с возрастанием θ; при θ ≈ π/2 он обращается в нуль, поэтому синхронные машины обычно работают с θ = 20 ÷ 35°, что соответствует двукратному или несколько большему запасу по моменту.
Статическая перегружаемость синхронной машины оценивается отношением
Согласно ГОСТу это отношение для турбогенераторов и гидрогенераторов должно быть не менее 1,6 – 1,7, а для синхронных двигателей большой и средней мощности – не менее 1,65.
Влияние тока возбуждения на устойчивость.
Устойчивость генератора при заданной величине активной мощности, отдаваемой в сеть, зависит от тока возбуждения. При увеличении тока возбуждения возрастает э.д.с. Е0 и, следовательно, момент Ммакс; при этом увеличивается устойчивость машины.
На рис. 1.37, б изображены угловые характеристики М = f (θ) при различных токах возбуждения (при различных Е0), откуда следует, что чем больше ток возбуждения, тем меньше угол θ при заданной нагрузке, а следовательно, тем больше отношение Ммакс/Мном и перегрузочная способность генератора.
Обычно электрическая сеть, на которую работают синхронные генераторы, создает для них активно-индуктивную нагрузку (генераторы отдают как активную Р, так и реактивную Q мощности). При этом синхронные генераторы должны работать с некоторым перевозбуждением, обеспечивающим повышение перегрузочной способности. Так, например, согласно ГОСТ в синхронных генераторах при номинальном режиме ток İa должен опережать напряжение сети Ùс (т.е. отставать от напряжения Ù) и иметь cosφ = 0,8. Однако если сеть создает активно-емкостную нагрузку (например, при подключении к ней большого числа статических или вращающихся компенсаторов), то генератор для поддержания стабильного напряжения должен будет работать с недовозбуждением, т.е. потреблять реактивную мощность. Такой режим будет для него весьма неблагоприятным, так как при уменьшении тока возбуждения и заданной активной мощности Р возрастает угол θ и снижается перегрузочная способность Ммакс/Мном, определяющая статическую устойчивость машины.
Реактивная мощность.
Для установления зависимости реактивной мощности Q от угла нагрузки θ в неявнополюсной машине рассмотрим треугольник ОАВ (см. рис. 1.34, а). Сторона этого треугольника
![]()
или с учетом модулей соответствующих векторов
![]() . (1.38)
. (1.38)
Следовательно, реактивная мощность машины
![]() . (1.39а)
. (1.39а)
При явнополюсной машине (см. рис. 1.34, б)
 . (1.39б)
. (1.39б)
Подставляя в (1.39б) значения токов Id и Iq из (1.34), имеем
![]() .
.
Заменив cos2θ и sin2θ их значениями через функции двойного угла 2θ, получим
 . (1.39в)
. (1.39в)
На рис. 1.38 показаны зависимости величин активной Р и реактивной Q мощностей от угла θ для неявнополюсной машины в пределах изменения угла – π/2 < θ < π/2.
В формуле (1.39в) и на рис. 1.38 положительному значению реактивной мощности соответствует режим, когда реактивная составляющая тока якоря отстает от вектора напряжения генератора, т.е. когда машина работает с перевозбуждением. В этом режиме по отношению к сети реактивная мощность генератора эквивалентна реактивной мощности конденсатора.
Максимальная реактивная мощность неявнополюсной машины соответствует θ = 0, т.е. имеет место при холостом ходе машины:
![]() . (1.40)
. (1.40)
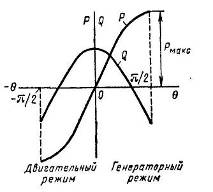
Рис. 1.38 – Зависимости мощностей Р и Q от угла нагрузки θ для неявнополюсной машины